����ʽ��ȡ�ϻ����˻����
��ͬ��
2007��7��10��
��δ������Ȩ�˺ͱ�վ���������ɲ���ת�غ�ʹ�ñ������
ժҪ�����Ķ����˲���������ʽ��ȡ�ϻ��ĸ����ģʽ�����˽��ܣ����ؽ��������˻���ǰ����
�ؼ�������ȡ�ϻ������˻���Զ�̿��ơ�ȫ�Զ�����άɨ��
1. ����
����ʽ��ȡ�ϻ���һ������ɢ�ϳ����϶ѷź���ȡɢ�ϵĴ����ʽ�ƶ��豸����Ҫ�ɶ���װ�á�����Ƥ�������ϲ��ֽṹ��������������תװ�á������ܡ�����װ�ü�β������ɣ��㷺Ӧ���ڸۿڡ��糧���ֳ���ˮ�೧���������ʽ��Ϊ�ֶ������Զ���ȫ�Զ����ֶ������˹��������ǹ��ڶ�ȡ�ϻ����ձ���õ�һ�ֿ��Ʒ�ʽ�����Զ�Ҳ��ͨ��˾�����в����������϶���״����ʱ�����趨�˵�Ͳ�ߣ�����ʵ���Զ���ҵ��˾�����м�غͱ�Ҫ�ĸ�Ԥ��ȫ�Զ���ָ�豸��Ϊ�ϳ���һ�����е�Ԫ���ٶ�����������Ϊϵͳ�Ķ������ֲ������̣�ͨ�ؽ����ǻ��ϲ����������Ա�������豸����ʶ���϶ѣ�ͨ��������ƣ���ɶ�ȡ��ҵ��������һ���������������
2. ���˻�
�������˲���������ʽ��ȡ�ϻ��ϲ��������Ա����Զ�̿��ƻ��Զ�������ɶ�ȡ��������ϳ����˻���������˻���
�������˻���ҵ���Դ��·�Ϊ���֣�Զ�̿�����ҵ��ȫ�Զ���ҵ��Զ�̿�����ҵ����������Ա���п��ƽ��п�����ҵ�����м�غ�Ԥ������ʽ��ȡ�ϻ���������Ӧ�߱����Զ����ܣ����������Զ���ֶ���ҵ���ϳ����˻���ʧȥ���壬��Ϊ�п���Ա��ͬʱ�ٿض�̨����ʽ��ȡ�ϻ���ҵ��ȫ�Զ���ҵ�ǽ�Ϊ�������˻����������˹���Ԥ��С��ֻ�볣����ӡ�
3. Զ�̿���
Զ�̿��Ƶ�Ŀ�ģ�
1) �������ӵ�Զ�̻������л���
2) ���ٲ�����Ա�ͼ�С����ǿ�ȣ�
3) ԭ�ϳ����Զ�����
4) ��ҵ�����ĸ��ƣ�Զ��۳���������
�봫ͳ�ĵ�һ���ϲ���������ʽ��ȡ�ϻ���Ƚϣ��汸Զ��/�Զ����������ܵ�����ʽ��ȡ�ϻ��ڹ�������Ҫ�����²��죺
1) ���ֵ�����ȷͬ������
����ȡ����ҵ�Ļ�ת�����Ķ˵�����Զ��ֵ����Ĵ�С���ж��ģ���������������£����ֵ�������ں㶨ֵ���²����������ֵ���������Сʱ�������ж���ת��������ѭ���Ķ˵㣬��ת�������ٲ�ͣ�ϣ�Ȼ����߲������ת�����϶�������������ڶ��ִ��ڹ���״̬�����ֵ����ᶸȻ���ӣ�ͨ����ת��������ʱֹͣ�����Զ������������⡣����������ʽ��ȡ�ϻ���ҵ�����о������ֵġ�
Ϊ��ʹ�����غ�״̬ͨ���������ȷͬ����������������װ�ò��ܲ���Һѹ������
2) ���¾�Ͳ�Ĺ��ܲ���
����ͨѶ���¾�Ͳ��������ΪͨѶ������ʹ�ã�ͬʱ��Ϊ�ź�ͨѶװ�ý��豸�����źŴ������п��ҡ�
3) �Զ����װ�õİ�װ
����������ת������������λ�ñ�����������ͷ�����������װ�û�2Dɨ���ǡ�
4) ��ҵ���ӵİ�װ
�ڱ�Ҫ�IJ�λ�����̨����ͷ�������ϲ��ֽṹ���������۵ײ������ֲ��������ת�ز�λ�ȡ�
5) �п��Ҽ��ӺͿ��ƹ��ܵ�ǿ��
����������ҵIJ���ͨ������CRT������ʽ����е�Զ���ҵ�������������ɵ��趨���Զ����ֶ�������ģʽ������ʱת����
��ҵ����������
1) ����
����������Ա�趨����λ�ã��Զ����ֶ���ȡ�ϻ�����ָ��λ�ã�ͨ���϶Ѹ߶ȼ��װ�ú��趨�Ķ��ϳ�����ж�����ҵ�����ڶ��Ϲ������豸���϶��Dz������ģ����Զ��Ϲ��̱Ƚϼ�
����Ϊʵ���Զ�ȡ����ҵ�����Ϲ��̲��������϶ѵ��γɹ��̣�ͬʱҲ�Ƕ�ȡ�ϻ����϶ѵļ�����̡�
�������ڰ���Ŀ�ĵĶ�ȡ�ϻ������Ϸ�ʽͨ�����������֣�
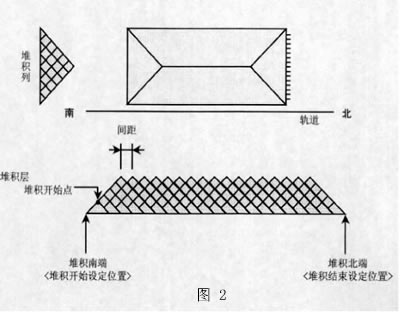
a.���ж���һ�ζ���(cone shell)
�������������ǹ̶����������һ�δﵽ�϶Ѹ߶ȣ���������ж�ֵ���룬������б�¶��ϡ����ֶ��Ϸ������ϳ���ʼ����ʱ�����ۿɵ�Щ������۳�̫����ɻ�����Ⱦ�������϶����ߣ����������������ﵽ�涨���϶Ѹ߶Ⱥ����۵����ǾͿ��Թ̶��ˣ��������������ζ��ϡ�
�������ж���һ�ζ�����Ӣ�г�Ϊ��cone shell���������ڰ���Ŀ�ĵĶ�ȡ�ϻ���Ϊ�ձ���õ�һ�ֶ��Ϸ�ʽ��ͬʱҲ���ڻ��ȶ�ȡ�ϻ�����ΰ�ʽȡ�ϻ���
�������ڶ��Ϲ��̱��ڼ��䣬����ѡ�Ķ��Ϸ�ʽ��
|
 |
|
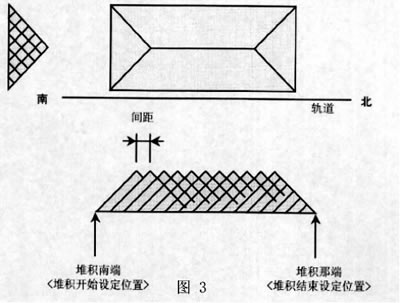
b�����ж���ֲ���ϣ����ֶѶ��㲼�ϡ�
�����ֲ�ֶѶ��㲼���ǽ����ۻ�ת��ѡ����λ�ã������ϲ�߶�ѡ�����Ƕȡ������й̶�ֵһ��һ�ѵز��ϣ������һ���һ�ź����ۻ�ת���ڶ��ŵ�λ�ã��Դ����ƣ���һ�㲼���Ϻ���������һ���ĽǶȣ����еڶ��㲼�ϣ����ѭ������γɱȽϹ�����϶ѡ�
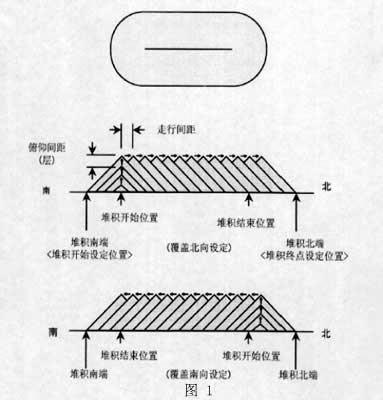
c����ת����ֲ���ϣ��������ۻ�ת�ֲ�ֶѶ�����ϡ�
�������ۻ�ת�ֲ�ֶѶ��㲼���ǽ���������ѡ����λ�ã����۸�����һ���ĸ߶ȣ������ۻ�ת���е�һ���϶Ѳ��ϣ���һ���϶Ѳ�����������й̶�ֵ�������ڶ����϶Ѳ���λ�ã��Դ����ƣ���һ�㲼���Ϻ���������һ���ĽǶȽ��еڶ��㲼�ϣ����ѭ����ֱ���γ����յĹ����϶ѡ�
2) ȡ��
��������ȡ�Ϲ��̱���Ӵ��϶ѣ����϶ѵ���֪�ر���Ҫ������Զ�̿��ƵĶ�ȡ�ϻ�������϶���һ���ļ���λ�ֶΣ���������������Ա�˹��Զ⣬�����Ӳ���ǿ�ȡ�
����������������������ƵĶ�ȡ�ϻ���ȡ�Ϸ�ʽֻ��һ�֣�������ת�ֲ�ȡ�ϣ�����ͼ��������ȡ���Dz������ģ���Ϊ�豸�ĸ������Ͳ�����Ʋ�ƥ�䡣
|
 |
|
����ȡ����ҵ�ĵ�һ���ǶԶ⣬����ȡ�ϻ�������λ�������϶ѵ�ȡ����ʼλ�ã���ȡ�ϻ�ͨ�����Ϲ��̵ļ�����Ժ�λ�ڶ���ͷ���ij����������жԶ⣬�����϶�������Ե�ʣ��˹���Ԥ�DZؿ��ٵġ�����ڶ�ȡ�ϻ������ϰ�װ��2Dɨ���ǣ�������ҵ��ʼʱ������������ƽ���ڹ��ʱ���ö�ȡ�ϻ����϶ѳ��Ƚ�������ɨ�裬����϶Ѷ���ͼ���Դ������жԶ⡣
Ȼ�����趨��߽��л�תȡ�ϣ��������ϼ���Ͷ��ֵ����ı仯�ж��϶ѵĻ�ת�˵㡣
�������ڽ��ߵ��趨ֵ����л��㡣
�����ϳ����˻�����Զ�̿���ģʽ���������У����ӳɱ����١������ʺ��ھɶ�ȡ�ϻ�����Ͷ�ȡ�ϻ���ҵƵ�ʲ��ߵij��ϣ���ֳ����糧��
4��ȫ�Զ���ҵ
����ȫ�Զ���ҵ�ǽϸ̶߳ȵ����˻����豸�������ϳ��������϶ѣ�������λ������֪�����������Զ����Ƴ�����������Զ���ȡ��ҵ�����߱�һ������������������豸�ļ�������ɼġ�
����ȫ�Զ����ƶ������ѳ�����GPS��λ����������ǰ�˺ͻ�ת�ֽṹ�����������ܶ�������װ����GPS���յ㣬������λ�ú�����λ�ý��ж�λ��ͨ��װ�ڻ�ת�ֽṹ�����������ܶ�������3Dɨ���Ƕ��϶ѽ���ɨ�裬������GPS���ϳ���λ�γ��϶Ѻ��豸�ĵ���ͼ����
�������ϲ���ͨ�����õ�cone shell��ʽ���ж��ϡ�
����ȡ����ҵ����ͨ����ʱɨ��ͳ���Ե���ͼ���Ľ�����ʵ�ֶ�ȡ�ϻ��Զ�Ѱ��Ѱַ���Խ���תģʽ���ȡ����ҵ��ͨ���������ֵ���������н�����У���ͻ�ת�߽��жϡ�
������ģʽ�¶�ȡ�ϻ�����ȷ���߶Զ⣬����ϵؽ�����ҵ����ҵЧ�ʸߣ��豸��۸ߣ�������ҵƵ�ʽϸߵ���ת��ͷ������Ŀ��
���˻��������̵��豸�Ŀ���ϵͳ������װ���п��ҡ��ڴ����ϳ��п���ͨ������������ϳ�ȫ���豸�Ĺ���״̬�������Թ۲쵽�ϳ���ͨ��ɨ����ɨ����϶ѵ�ʱʱ״̬�����˻�����ϵͳ�Ĺؼ��������ϳ���״ɨ������ݴ������豸������ϳ���λ�ù�ϵ��ʶ���ִ�С�
ϵͳ��ɣ�
1) �϶�ʶ��ϵͳ
�����ݶԵ�ǰ��������ϳ��Զ����������˽�����������ɨ����άͼ��ʶ����Ϊ������������ͼ��ʶ��������ˣ���ϵͳ���ü���ɨ����άͼ��ʶ�����������������Ƚ��ɿ��ļ���������֤��ʵ����Ҳ�ɿ��ǣ�������ﵽҪ��
ϵͳҪ��
ɨ��뾶-----------------------------��80m
ɨ�����-----------------------------��5cm
ɨ��Ƕ�-----------------------------180��
��Ӧʱ��-----------------------------��20ms
��Ӧ�����¶�-----------------------��20��+50��
�����ȼ�-----------------------------IP67
ͨѶЭ��-----------------------------��̫����������Э��
ϵͳӦ�����������۳����������������Ӱ�졣
����ɨ���Ǻ���άͼ��ʶ���������������װ�ڶ����Ĺ��ػ������һϵͳ�ز����ٵ���Ӳ����
2) ��ҵ����ϵͳ
������������ʽ��ȡ�ϻ������˻����������������걸��ITVϵͳ������ͼ��ģ���źž�ͨ�����˴����п��ң��п��ҿɿ��ƻ�����������ͷ���ƶ������������ɽ��л����л�������ת�����ϵ㴦�����¾�Ͳ��˾���ҵȾ����д�佹����Ƕȴ��ɵ���̨�IJ�ɫ����ͷ��������Ա���п���ͨ������˾���ҵ�����ͷ���м�ز���
3) ����ʽ��ȡ�ϻ���λ���
��������ʽ��ȡ�ϻ���ת������������λ�ü�����GPSȫ��λ������ͳ�ı�������⼼����ϵͳ���밲ȫ�ɿ������������5cm��0.1�㡣
4) �������ؼ��
����ʽ��ȡ�ϻ���ͨ���������ػ���������ȷ�����ֳ������ͳ��ϵ���dz���Ӷ����ڸ����Ƕȣ���ת�ٶȺ����н��ߣ�ȷ����ת�˵㡣
5) ͨѶϵͳ
����ʽ��ȡ�ϻ����п���ͨѶ���ù�����̫��������Ϊ���˲��������ͨѶϵͳ���밲ȫ�ɿ����ɿ��Ǽ�һ��������̫����Ϊ���á�
6) ����ϵͳ
��������ϵͳ����λ����PLC������������װ���������豸��ɡ�
�����Զ�����ģʽ������
��������ʽ��ȡ�ϻ����Ͽ���ģʽͬԶ�̿������ƣ�ֻ�Dz���Ҫ�����ϼ��䡣�����ص����һ��ȡ�Ͽ���ģʽ��
��������ʽ��ȡ�ϻ���PLC�������λ����̬������������������άͼ��������ܣ���ˣ�ɨ��õ����϶�ͼ�����϶�ʶ��ϵͳ�з������������ն�ȡ�ϵĹ��պ�����ϵ����ͼ������ȡ�ϻ����ϻ�ȡ�����赽���λ�õ���ά���꣨����λ�ã���ת�Ƕȣ������Ƕȣ�������ȡ�ϻ��Ŀ���ϵͳ������������£�
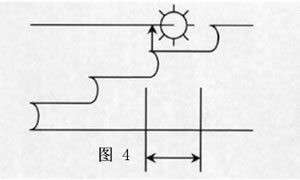
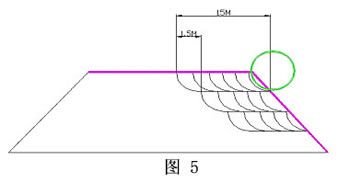
������Ҫȡijһ�϶�ʱ���п��ҽ����϶ѺŴ����϶�ʶ��ϵͳ��ϵͳ�������϶ѵ�ͼ��ȷ������ά���꣬�����䴫����ȡ�ϻ��Ŀ���ϵͳ���϶�����ʱ����Ӧ���е���λ����ͼ5��ʾ��
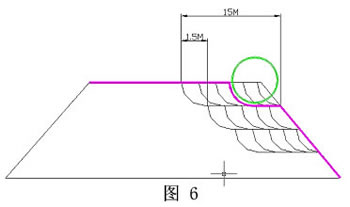
�����϶���ȡ��һ���֣�����û�дﵽȡ���һ��ij��ȣ�����Ϊʮ���ף����϶�ʶ��ϵͳӦ����ͼ�η���������Ӧ���е���λ����ͼ6��ʾ��
|
|
|
|
 |
|
|
 |
|
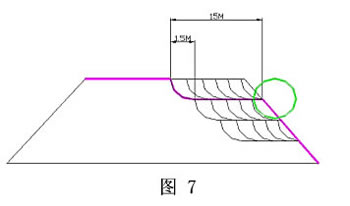
������Ҫȡ���϶ѵ�һ������Ѵﵽʮ���ף��ٶ�ֵ�����϶�ʶ��ϵͳӦ���жϳ�����������λ����ͼ7��ʾ��
�����϶�ʶ��ϵͳ��Ӧ�������϶��ش����з�����ֹ��λ�ô�������ϵͳ��������λ����ʾ�϶�ģ��ͼ�Σ���ͼ8����
|
 |
|
|
 |
|
����������ҵʱ��ȡ�ϻ����ֲ������϶ѵ���һ�𣬺��ѽ���ʵʱ���϶�ɨ�裬��˿���ϵͳ�轫��ȡ��ҵ�źŴ����϶�ʶ��ϵͳ���϶�ʶ��ϵͳ������ҵ��Χȷ���ö��϶���״�Ѹı䣬������ɨ�裬������δɨ��IJ�����ͼ�����Բ�ͬ��ɫ��ʾ���������ϵͳ����ɨ�������źš�
����Ϊ�˲�Ӱ������Ч�ʣ���ȡ�ϻ�һ�㲻��ר�ŵ�ɨ�����У�Ӧ����ҵ��϶������������Զ����ɨ����ҵ���ɸ��ݶ�ȡ�ϻ�״̬�ж��Ƿ�ɽ���ɨ����ҵ�������ۻ�ת�Ƕ�С�ڡ�6��ʱ��ϵͳ�Ϳ��ж����۲����϶��Ϸ������ɽ���ɨ����ҵ��
�����϶ѷ�Χ��ȷ����ÿ���϶ѵ���ֹ�㰴�ϳ�ͳһ�滮�ɿ���ϵͳ����ֹ�㴫���϶�ʶ��ϵͳ���Զ�����ʱ�϶�ʶ��ϵͳ���ɰ��չ滮�õķ�Χ�趨������ֹ�㣬��������ά���괫������ϵͳ��
��ҵ������
��������ʱ�������ȶ��϶�λ�õı�ţ������϶ѱ�ź��룬�豸�����Զ�������Ԥ������϶ѽ��ж�����ҵ��
ͬ����ֻ������ָ��ȡ���϶Ѻ��룬�豸�Զ�������ָ���϶ѣ��ԶԶ⣬�Զ���ҵ��
5.������
���������й����÷�չ����ҵ���ͳ��л�ˮƽҲԽ��Խ�ߣ��˹��ɱ�Ҳ�������ӣ�����Ҫ��ҲԽ��Խ�ߡ����ǵĹ�������ҲӦ������ת�ƣ�����ǿ�Ȼ���С����ȡ�ϻ����˻���Ӧ����һ�仯��������Ա����Զ���ϳ��ķ۳�����������һ�̲���ز����ֱ����ϳ����Բ����ڱܷ����ó��������ٴ���ﳾ��
������ȡ�ϻ����˻�����ʵ�־����ȶ���ҵ�������豸ά��ά������
����������һԭ���ڷ�����Ҷ�ȡ�ϻ����˻����õؽ�Ϊ�ձ顣���ձ���������һЩ�糧��������Զ�̿��ƶ�ȡ�ϻ����ڵ¹���������ɯ����һ����ת��ͷ����̨2500t/h��ʯ��ȡ�ϻ�����̨1500t/hú̿��ȡ�ϻ���������ȫ�Զ���ʽ�������п��������������Ա���Զ�ȡ�ϻ���װж�������м�ء��¹���һЩ�糧��¹�ص���Ҳ����ˡ�
�������ڣ����˻�������ʽ������ʽ��ȡ�ϻ����û���ͬ�������������Ŀ��ʼҪ��������˻���������������ɽ�۶��ڹ��̵�����ʽ���ֶ�ȡ�ϻ��IJ����������˻�ģʽ�� ��������ʽ��ȡ�ϻ����˻����й���Ӧ�ú��û������˻������˽⣬���и������ͷ�͵糧�ھ��豸��������豸ѡȡ�ϣ���Խ��Խ�������˻�����һ�㣬Ҳ�������û�����������еõ���֤���û������ڹ�����������ȡ�ϻ����ֶ�/�Զ������ƣ�������ǰ�����˻��IJ��˽⣬�Զ�����Ϊ����Ϊ���Զ���������ȫ�Զ����ĸ����ƹ㿪�����û�����һ�����Ŀǰ�˹�����������ʽ��ȡ�ϻ����������ϳ��������
�����
1��Karl Heinz Walter and Steffen Ballmann��Unmanned operation of conveying
equipment in the fortuna stockpile��Surface Mining 55(2003).No.4/2003
��δ������Ȩ�˺ͱ�վ���������ɲ���ת�غ�ʹ�ñ������